Virtuální hranice – inteligentní detekce osob a vozidel
Funkce překročení virtuální hranice v kamerových systémech s umělou inteligencí umožňuje automaticky detekovat osoby a vozidla, která překročí vámi definovanou virtuální linii. Opírá se o algoritmy schopné analyzovat obraz a rozlišovat mezi lidmi, vozidly a jinými objekty, jako jsou zvířata nebo stromy.

Výhody funkce překročení virtuální hranice
- Zvýšená bezpečnost: Funkce včas upozorní na neoprávněný vstup do chráněného prostoru, čímž pomáhá předcházet krádežím a vandalismu.
- Snížení počtu falešných poplachů: Na rozdíl od tradičních detektorů pohybu, které reagují na jakýkoliv pohyb v záběru, detekce virtuální hranice eliminuje falešné poplachy způsobené pohybem zvířat, větví stromů nebo stínů.
- Vyšší efektivita monitorování: Operátoři sledují pouze relevantní události, čímž se snižuje únava a zvyšuje efektivita dohledu.
- Automatická aktivace: Při překročení hranice může systém automaticky spustit alarm, odeslat upozornění operátorovi nebo aktivovat další kameru.
- Sběr dat: Funkce umožňuje sbírat data o pohybu osob a vozidel v chráněném prostoru, která lze dále analyzovat a využít k optimalizaci provozu.
Jak funkce překročení virtuální hranice funguje
- Definování virtuální hranice: Operátor určí linii, kterou nesmí osoby ani vozidla překročit.
- Analýza obrazu: Algoritmy průběžně analyzují obraz a hledají osoby nebo vozidla překračující stanovenou hranici.
- Detekce překročení: Pokud systém zaznamená překročení virtuální hranice v definovaném směru, okamžitě aktivuje nastavené akce.
Typy překročení virtuální hranice
- Směry překročení: Systém detekuje vstup osoby nebo vozidla do definované zóny z jednoho nebo obou směrů.
Funkce překročení virtuální hranice je cenným nástrojem pro kamerové systémy – zvyšuje bezpečnost, snižuje počet falešných poplachů a umožňuje efektivnější monitorování.
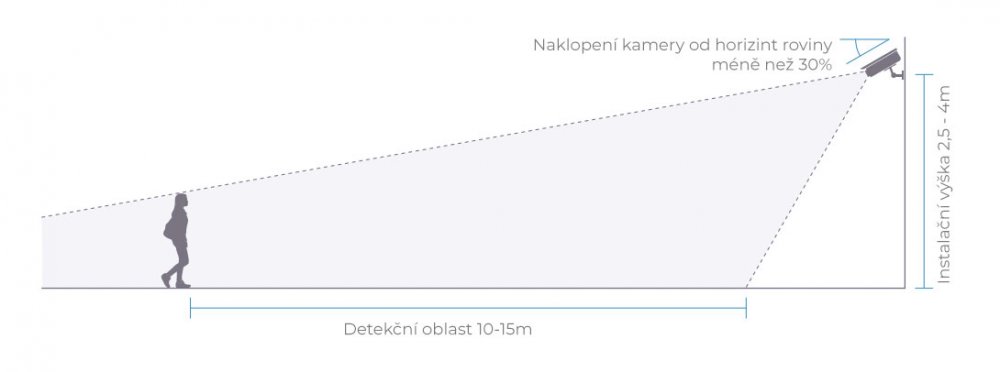
Podmínky správného fungování detekce
Bezpečnostní kamera musí být umístěna ve výšce 2–4 m. Úhel naklopení vůči horizontální rovině nesmí překročit 30°. Detekční vzdálenost je 10–15 m. Mezi sledovanou osobou nebo vozidlem nesmí stát žádný předmět, který by bránil výhledu. Nedodržení těchto podmínek může mít za následek nesprávné fungování detekčních funkcí.